Измерение крутящего момента на вращающихся валах
Аннотация
В данной работе представлено устройство измерения крутящего момента на вращающихся валах различных технических систем. Устройство выполнено на основе цифрового радиоканала. Описана методика калибровки устройства и представлен примеры измерений на валах различных механизмов.
Ключевые слова: Тензометрия, крутящий момент, цифровой радиоканал.Ключевые слова:
Введение. Крутящий момент на валах технических устройств является важной характеристикой, которая определяет границы применимости и эффективность использования устройств. Измерение его, особенно на вращающихся валах подвижных устройств, является сложной технической задачей, для решения которой в мире разработано значительное количество устройств с разными принципами действия. В некоторых случаях определение крутящего момента, а соответственно и мощности объекта, осуществляется по опосредованным показателям. Например, на автомобилях момент могут определять по подаче топлива, температуре выхлопных газов и другим показаниям. Такой подход не позволяет с высокой степенью достоверности определить потребную мощность. Точное измерение момента осуществляют с помощью систем определяющих крутящую деформацию вала, однако такие системы бывают весьма сложны.
Измерение крутящего момента на валу. Один из распространенных методов измерения деформации вала является использование тензометрического моста [1]. В этом случае на вал наклеиваются тензометры сопротивления под углом 45° к оси вращения, электрически соединенные по мостовой схеме. Применение этой схемы увеличивает чувствительность, улучшает линейность получаемой характеристики, значительно уменьшает влияние температуры на величину выходного сигнала. Кроме того, преимуществом моста является то, что с его помощью измеряется только изменение, а не общее сопротивление.
Основную сложность в устройстве, использующем тензометры, представляет собой передача данных о сопротивлении чувствительных элементов с вращающегося вала потребителю. Долгое время для этого использовались контактные, индукционные, светотехнические и другие устройства. Современное развитие электроники позволяет с помощью цифрового радиоканала сделать передачу данных максимально простой. Малогабаритный радиопередатчик может быть установлен непосредственно на вращающемся валу и передавать параметры на не вращающийся приемник. Использование миниатюрных передатчиков позволяет определять крутящие моменты сразу на нескольких валах, передавая информацию на один приемник.
Устройство, использующее тензометрические устройства и цифровой радиоканал было реализовано авторами и испытано на ряде устройств. В разработанном устройстве в качестве передатчика использовался готовый приемопередающий радиомодуль DP1201A. Он представляет собой функционально завершенное устройство, устанавливаемое на плату микроконтроллера. Имея малые характеристики энергопотребления (типичное значение тока потребления в режиме ожидания составляет 0,2 мкА) передатчик оптимизирован для приложений, предъявляющих к компонентам такие требования, как небольшие размеры, низкую стоимость и цифровой интерфейс. В составе радиомодуля применяется интегрированный полудуплексный трансивер, работающий в частотном диапазоне 433 МГц. Встроенный синхронизатор данных позволяет подключать простые микроконтроллеры с минимальными схемотехническими затратами. Управление передатчиком осуществлялось по последовательному периферийному интерфейсу SPI. SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым процессором. В качестве управляющего процессора использован ADUC7061. Это связано с тем, что он имеет встроенное 24-х битное АЦП, что позволяет избежать установки дополнительного преобразователя. Так же к положительным свойствам данного микроконтроллера можно отнести малое напряжение питания — 2,5 В, что понизит общее напряжение питания и размеры батареи на вращающемся валу .
В состав радиоприемника, так же как и в радиопередатчик, входит настроенный на прием данных радиомодуль DP1201A (рис. 1). Так как для радиоприемника АЦП не требуется, в качестве управляющего процессора использовался PIC16F876A. Он так же как и ADUC7061 имеет малые габариты и последовательный периферийный интерфейс SPI. Принятые и обработанные процессором данные передаются на систему измерений.
Рис. 1. Внешний вид плат передатчика и приемника измерителя крутящего момента
Общая схема работы измерителя крутящего момента представлена на рис. 2. Дальность действия цифрового радиоканала составляет около 100 м, что вполне достаточно для снятия характеристик при установке приемника на неподвижное основание или на не вращающуюся часть транспортного средства.
Как видно из рисунка непосредственно на вал устанавливается передатчик, а снизу противовес в виде аккумулятора передатчика, который компенсирует массу передатчика. Также на валу приклеен тензомост, состоящий из 4 тензорезисторов, соединенных с передатчиком. При наклейке тензометров необходимо учитывать, что для качественного измерения на расстоянии 20 мм слева и справа от площадки наклейки тензорезисторов не должно быть изменений формы или толщины вала.
Рис. 2. Структурная схема измерителя крутящего момента
В целом измеритель крутящего момента имеет незначительные размеры и вес, позволяющие устанавливать его на валы промышленного оборудования, транспортных средств и на другие устройства.
Для калибровки датчиков создана программа, которая по нескольким точкам по известным нагружениям выстраивает зависимость для всего моментного диапазона. Крутящий момент в свою очередь можно задавать или тарированными весами, устанавливаемыми на замеренном плече или растягивающим устройством (например, лебедкой) с использованием динамометра. При наличии на валу растягивающих усилий целесообразно калибровать отдельный тензометр, который рассчитан на учет только растягивающих усилий. В таком случае калибровка происходит в два этапа.
- На валу создаются только растягивающие усилия. Величина усилий с линейного тензодатчика и тензомоста крутящего момента заносится в контроллер передатчика. По полученным значениям непосредственно в цифровых кодах строится зависимость показаний тензомоста от растягивающего тензометра.
- На валу создается крутящий момент. Считывается и фиксируется величина кодов АЦП приходящая с тензомоста.
Программа калибровки готовит данные для определения крутящего момента. Само программное обеспечение предусматривает два алгоритма дальнейшего пересчета данных. В соответствие с первым строится линейная зависимость коэффициента калибровки:
![]() , (1)
, (1)
где М — значение задаваемых моментов,
m — коды АЦП, приходящие с тензомоста,
![]() — поправочная величина момента, определяемая по калибровочным данным тензомоста, зависящего от линейной деформации.
— поправочная величина момента, определяемая по калибровочным данным тензомоста, зависящего от линейной деформации.
В соответствие со вторым методом строится нелинейная зависимость. В этом случае целесообразно аппроксимировать экспериментальные значения методом наименьших квадратов невязок. Зависимость момента от калибровочных коэффициентов А0, А1 определяется полиномом первой степени:
![]() (2)
(2)
Задача заключается в том, чтобы определить такие значения коэффициентов А0, А1, при которых кривая как можно ближе проходила бы от всех n точек определенных при калибровке (M1,m1); (M2,m2);… (Mn,mn); найденных экспериментально [2].
В данном случае нельзя найти такую кривую, которая проходила бы через все заданные точки. Более того, ни одна из рассматриваемых точек не удовлетворяет точно уравнению, и если подставить в него координаты этих точек, то получается следующая система:
 , (3)
, (3)
где δ1, δ2, …, δn – невязки.
Согласно принципу наименьших квадратов, наилучшие значения коэффициентов А0, А1 будут те, для которых сумма квадратов невязок наименьшая, т.е. значение ![]() имеет минимум.
имеет минимум.
Таким образом, величина
![]() , (4)
, (4)
которая рассматривается как функция коэффициентов А0, А1, должна иметь минимум. Необходимое условие минимума функции многих переменных заключается в том, что все её частные производные должны равняться нулю. Дифференцирование обеих частей уравнения приводит к системе уравнений:
 , (5)
, (5)
Следовательно, вместо исходной системы, которая есть система несовместная, так как имеет n уравнений с 2 неизвестными (n>1), получается система линейных уравнений с коэффициентами А0, А1,. Так как система (5) найдена дифференцированием выражения (4) по неизвестным коэффициентам А0, А1, то в ней при любом n>1 число уравнений точно равно числу неизвестных.
Преобразуя систему (5) к виду, более удобному для ее решения, воспользовавшись вместо обозначений ![]() обозначениями, введенными Гауссом получается:
обозначениями, введенными Гауссом получается:
![]() (6)
(6)
Тогда система (5) после сокращения всех уравнений на 2 и перегруппирования членов принимает вид:
![]() (7)
(7)
Поскольку А0, А1, относительно рассматриваемых сумм есть величины постоянные, то, согласно свойству сумм, из первого уравнения системы (5) получается следующее выражение:
![]() , (8)
, (8)
т.е. первое уравнение системы (7). Все остальные уравнения системы (5) преобразуются аналогично. Коэффициенты этих уравнений вычисляются по известным координатам заданных точек ![]()
Для решения данной системы уравнений использовался метод Гаусса, как наиболее удобный для машинного вычисления. При выполнении расчетов посредством последовательных исключений неизвестных данная система превращается в ступенчатую систему. Исходя из системы (7) составляется расширенная матрица системы следующего вида:
![]() (9)
(9)
Точное решение для невырожденной матрицы определяется за вполне определенное количество операций. При этом выполняется вначале прямой ход — расширенная матрица приводится к треугольному виду:
![]() . (10)
. (10)
Необходимое условие — отсутствие на диагонали матрицы нулевых элементов. Затем выполняется обратный ход — когда находятся все неизвестные вектора M, начиная с последнего. При прямом ходе первая строка расширенной матрицы делится на n:
![]() . (11)
. (11)
Последующее вычитание из второй строки расширенной матрицы произведения ![]() на измененную первую строку матрицы:
на измененную первую строку матрицы:
![]() (12)
(12)
приводит к следующему виду матрицы:
![]() . (13)
. (13)
Делением второй строки на [m2], матрица приводится к верхнетреугольному виду:
![]() . (14)
. (14)
После этого получается следующая система уравнений, эквивалентная исходной:
![]() . (15)
. (15)
Последовательно находятся корни А0, А1:
![]() (16)
(16)
Учитывая, что деформация, как правило, происходит в линейной зоне аппроксимация по первому варианту, т.е. линейная может быть принята вполне адекватной. Однако существуют погрешности связанные с влиянием клея тензорезисторов и неточностью наклейки. Эти погрешности могут быть учтены путем калибровки.
Вследствие этого целесообразно применять следующий порядок использования датчиков. В случае если при калибровке значения момента задаются в пределах, превышающих моменты, которые могут возникнуть на валу в режиме эксплуатации, то целесообразно использовать второй, нелинейный вариант расчета. Если значения момента могут превысить калибровочные величины, необходимо применять линейный вариант расчета. Точность при этом будет несколько ниже.
Предложенная методика позволяет успешно калибровать тензомосты не только для измерения крутящих моментов, но и изгибающих и растягивающих напряжений. Тензометры при этом наклеиваются вдоль линии растяжения-сжатия.
На основании данных алгоритмов была создана программа работы с датчиком крутящего момента, которая позволяет выбирать тот или иной метод пересчета данных. В процессе работы данные могут передаваться непосредственно на монитор или на бортовой накопитель.
Для испытаний измерителя крутящего момента на различных объектах было изготовлено несколько тестовых комплектов устройств.
Один экземпляр был установлен на трансмиссионном валу заднеприводного автомобиля ВАЗ. Параллельно с крутящим моментом велась запись частоты вращения и координат спутниковой навигационной системы. Выполненные в г. Ростове-на-Дону и за городом замеры показали не только высокую эффективность измерения характеристик трансмиссии, но и позволили оценить потребную мощность автомобиля двигающегося в потоке транспорта в нашем городе. Так, в городской черте потребная мощность практически не превышала 20 л.с. Пример записи мощности на валу в зависимости от времени на улице 40-летия Победы показан на рис. 3.
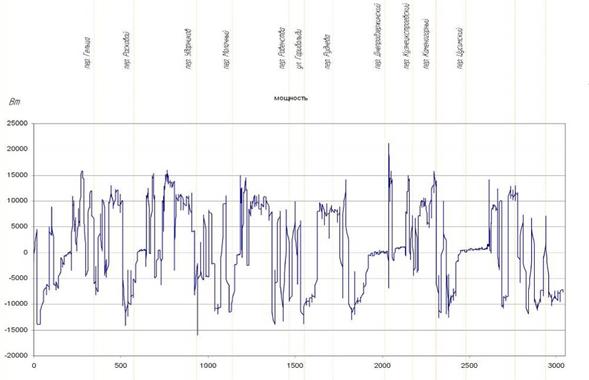
Рис. 3. Результаты измерения мощности с помощью датчика крутящего момента, установленного на трансмиссионном валу легкового автомобиля, двигающегося в потоке транспорта по улице 40лет Победы г. Ростова-на-Дону
Еще одно испытание датчика было выполнено на сверхлегком соосном вертолете «Роторфлай». Измеритель крутящего момента, совмещенный с системой бортовых измерений, позволил оценить энергетические характеристики воздушного судна на различных режимах. Пример записи крутящего момента верхнего несущего винта с частотой дискретизации 32 Гц пересчитанного в потребную мощность на валу для одного из режимов полета показан на рис. 4.
|
|
|

Рис. 4. Запись мощности на валу верхнего несущего винта вертолета на одном из режимов (полет с горизонтальной скоростью 70 км/ч с вертикальным снижением 2 м/с)
В настоящее время ведется подготовка к использованию предложенного датчика крутящего момента для оптимизации работы малых ветроэнергетических установок (рис. 5).
Эксперименты показывают, что использование тензомоста для измерения крутящего момента в сочетании с высокоразрядным АЦП и малогабаритным радиоканалом позволяет измерять практически неограниченный диапазон моментов на вращающихся валах. Он обнаруживает малейшее изменение момента на валу и продолжает измерять его вплоть до моментов, приложение которых разрушит вал.
 |
|

Рис. 5. Внешний вид двухлопастной ветроэнергетической установки (слева) и измеритель крутящего момента, установленный внутри гондолы (справа).
Заключение. Таким образом, применение предложенного измерителя крутящего момента может позволить определять потребные мощности и нагрузки на вращающихся валах даже на подвижных объектах. Нагрузки при этом могут выходить за пределы зоны калибровки, что может быть выполнено с линейными алгоритмами аппроксимации. Определение нагрузок в пределах величин калибровки с нелинейными алгоритмами позволяет учесть влияние различных факторов на погрешность и повысить точность измерений.
Литература:
1.Михеев Р.А., Лосев В.С., Бубнов А.В. Летные прочностные испытания вертолетов. – М.: Машиностроение, 1987. – 126с.
2.Фильчаков П.Ф. Графические и численные методы прикладной математики. – Киев: Наукова думка, 1970. – 770с.