Движение мостовых кранов, имеющих конические колеса
Аннотация
Рассмотрены актуальные для атомных станций вопросы, связанные с обеспечением штатной работы ходовой части мостовых кранов с коническими колесами
Ключевые слова: Кран мостового типа; геометрическая теория движения; перекос колес
Производством полярных кранов занимались Россия (ПО «Сибтяжмаш»), Германия и Югославия. За исключением 3-го блока Калининской АЭС, с краном немецкого производства, все остальные краны имели цилиндрические колёса. Для 2-го блока Ростовской АЭС с реактором ВВЭР-1000, по заказу станции ПО «Сибтяжмаш» изготовил полярный кран с коническими колёсами. Полная масса крана с электрооборудованием 585т. Тип подкранового рельса – КР 140.
Особенности движения полярного крана с цилиндрическими колёсами проанализированы в работах. Показано, что круговое движение полярного крана, имеющего цилиндрические колеса, обеспечивается парами колес объединенных в малых балансирах. Отмечено, что в пятне контакта каждого цилиндрического колеса на внешней стороне полосы катания рельса наблюдается скольжение рельса относительно колеса, так как расстояние вдоль его больше чем пройденный путь колесом равный одному обороту. На внутренней стороне полосы катания установлено скольжение колеса относительно рельса, так как расстояние пройденного колесом, равное одному обороту, больше чем расстояние вдоль рельса. В этой зоне регистрируется дополнительное усилие, следствием которого является отрицательное ускорение (торможение) для колеса. Таким образом, в пятне контакта цилиндрического колеса формируется момент сил стремящийся развернуть колесо таким образом, что передняя часть по ходу движения стремится вовнутрь окружности катания.
Доказано, что перекос колеса в горизонтальной плоскости приводит к возникновению в ходовой части крана (малых балансирах, главных балансирах) в концевых и главных балках крана дополнительных напряжений. Вследствие этого появляется увод главной оси симметрии крана с диаметра на хорду, неравномерность движения крана сопряженная с «прострелами» колес, то есть частичным их возвратом в положение меньших напряжений элементов м/к крана. Всё перечисленное обуславливает ненормативное снижение ресурса крана. Изложенная теория получила практическое подтверждение при измерениях геометрических параметров на кранах Ростовской и Балаковской АЭС, а способы технической диагностики ходовой части мостовых кранов реализованы в двух патентах.
Рассмотрим особенности движения полярного крана с коническими колёсами. В начале отметим, что свободное цилиндрическое колесо, стоящее на плоскости, катиться по прямой линии, а свободное коническое колесо катиться по горизонтальной окружности с центром в вершине конуса. Угол наклона плоскости колеса к плоскости качения в этом случае составляет половину угла при вершине конуса, т.е. равен углу  между высотой конуса и его образующей. Для обеспечения вертикального положения колеса центр качения необходимо поднять по вертикали на половину внешнего диаметра колеса
между высотой конуса и его образующей. Для обеспечения вертикального положения колеса центр качения необходимо поднять по вертикали на половину внешнего диаметра колеса  . При этом траекторией движения колеса будет окружность с радиусом равным высоте конуса. Движение по окружности цилиндрическими колесами может быть обеспечено с помощью минимум пары колёс. Причём угол их взаимного разворота определяет радиус этой окружности. То есть с точки зрения обеспечения движения по окружности одно коническое колесо формально эквивалентно паре цилиндрических колёс. Поэтому у полярного крана цилиндрические колёса обязательно должны быть объединены в малом балансире, тогда как конические колёса такого объединения не требуют.
. При этом траекторией движения колеса будет окружность с радиусом равным высоте конуса. Движение по окружности цилиндрическими колесами может быть обеспечено с помощью минимум пары колёс. Причём угол их взаимного разворота определяет радиус этой окружности. То есть с точки зрения обеспечения движения по окружности одно коническое колесо формально эквивалентно паре цилиндрических колёс. Поэтому у полярного крана цилиндрические колёса обязательно должны быть объединены в малом балансире, тогда как конические колёса такого объединения не требуют.
Для 2-го блока Ростовской АЭС коническое колесо полярного крана установлено вертикально, как указано в чертежах имеет угол скоса  или 0,018617 рад колёса объединены в малые и большие балансиры. Считаем, что колесо смонтировано без отклонения от вертикали. Рассмотрим по отдельности влияние следующих факторов: а) неточность изготовления по внутреннему и внешнему диаметрам колеса (равномерного износа); б) неточность изготовления по углу скоса колеса.
или 0,018617 рад колёса объединены в малые и большие балансиры. Считаем, что колесо смонтировано без отклонения от вертикали. Рассмотрим по отдельности влияние следующих факторов: а) неточность изготовления по внутреннему и внешнему диаметрам колеса (равномерного износа); б) неточность изготовления по углу скоса колеса.
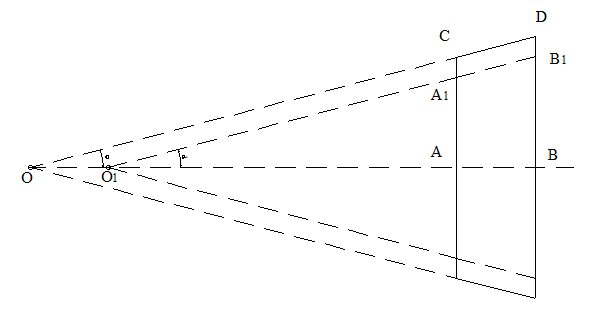
Рис.1. α – нормативный угол скоса, α1 – в изношенном состоянии или при неточности изготовления.
Пусть колесо имеет неточность изготовления по диаметрам. Тогда эта неточность, рис. 1, вызовет смещение центра качения этого колеса от проектного положения на  - отрезок ОО1. Выразим это смещение через изменение наружного радиуса колеса:
- отрезок ОО1. Выразим это смещение через изменение наружного радиуса колеса:
 . (1)
. (1)
Из равенства (1) следует, что зависимость смещения центра качения (центра мгновенного вращения) от неточности изготовления линейная. Отобразим её в виде графика, рис. 2, построенного посредством Mathcad.
Указанная зависимость для практического применения табулирована. Например, при неточности  =0,1мм радиальное смещение составило 5,4мм. Отметим, что при эксплуатации допускается износ поверхности катания до 15% толщины обода и разность в диаметрах колёс не более
=0,1мм радиальное смещение составило 5,4мм. Отметим, что при эксплуатации допускается износ поверхности катания до 15% толщины обода и разность в диаметрах колёс не более  от номинального диаметра. При диаметре 800мм получим
от номинального диаметра. При диаметре 800мм получим  мм.
мм.
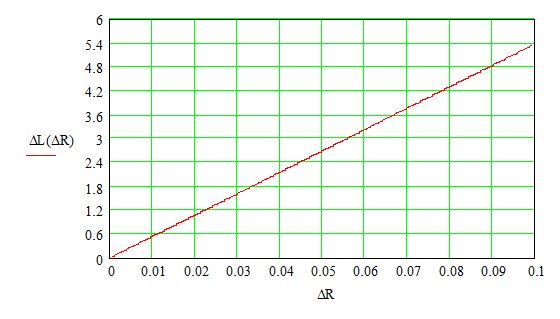
Рис.2. - График зависимости смешения центров качения конических
колёс от неточности изготовления или износа  , мм.
, мм.
Пусть колесо имеет неточность изготовления по углу скоса  или, что равносильно неточность изготовления
или, что равносильно неточность изготовления  по внутреннему диаметру колеса
по внутреннему диаметру колеса  . В этом случае эта неточность, рис. 1, вызовет смещение центра качения этого колеса от проектного положения на
. В этом случае эта неточность, рис. 1, вызовет смещение центра качения этого колеса от проектного положения на  - отрезок ОО1 , длина которого вычисляется по формуле:
- отрезок ОО1 , длина которого вычисляется по формуле:
 , (2)
, (2)
где  , или
, или
 . (3)
. (3)
В равенстве (3) d ширина колеса, у обследованных полярных кранов Ростовской и Балаковской АЭС d=240мм. Как следует из равенств (2), (3) зависимость смещения центра качения (центра мгновенного вращения) от угла скоса  (неточности изготовления
(неточности изготовления  по внутреннему диаметру колеса) нелинейная.
по внутреннему диаметру колеса) нелинейная.
Отобразим её в виде графика, рис. 2 построенного посредством Mathcad.
Например, при  мм
мм  радиальное смещение составило 470мм. Найдём точное значение угла α, приравняв правую часть равенства (2) к нулю. Из полученного трансцендентного уравнения получим
радиальное смещение составило 470мм. Найдём точное значение угла α, приравняв правую часть равенства (2) к нулю. Из полученного трансцендентного уравнения получим  ли
ли  . Отметим, что округление значения угла на чертеже привело к смещению центра качения на 132,9мм. В работе описана специфика движения цилиндрического колеса по окружности, обусловленная трением скольжения в пятне контакта колеса по рельсу и наоборот. Это связано с тем, что внутренняя и наружная части поверхности колеса проходят разную длину пути. Такое же явление возникает и при движении конического колеса по окружности, только внутренняя часть поверхности колеса будет проходить несколько меньший путь по сравнению с цилиндрическим колесом.
. Отметим, что округление значения угла на чертеже привело к смещению центра качения на 132,9мм. В работе описана специфика движения цилиндрического колеса по окружности, обусловленная трением скольжения в пятне контакта колеса по рельсу и наоборот. Это связано с тем, что внутренняя и наружная части поверхности колеса проходят разную длину пути. Такое же явление возникает и при движении конического колеса по окружности, только внутренняя часть поверхности колеса будет проходить несколько меньший путь по сравнению с цилиндрическим колесом.
Принципиальное различие цилиндрических и конических колёс проявляется и при сборке их в систему – ходовую часть мостового крана. Так неточность в диаметре и радиальное смещение цилиндрического колеса не вызывает существенных трудностей при обеспечении совмещения центра вращения крана и рельсового пути. Цилиндрические колёса могут быть расположены даже на окружностях разных радиусов, только концентрических. У конического колеса радиальное смещение сразу вызывает несовпадение центра его качения с центром вращения крана и рельсового пути. При эксплуатации допускается износ поверхности катания до 15% толщины обода и разность в диаметрах колёс не более  от номинального диаметра.
от номинального диаметра.
Необходимо отметить, что в связи со скосом конического колеса при касании его с цилиндрической частью головки рельса КР–140 силовая плоскость не проходит через ось симметрии рельса. Последнее обстоятельство приводит к ненормативной нагрузке на рельс в виде изгиба с кручением.
Выводы:
- конические колёса требуют более жёсткого контроля за точностью соблюдения номинальных размеров на заводе-изготовителе, поскольку отклонения даже в пределах допуска существенно сказывается на положении центра качения колеса;
- монтаж и наладка ходовой части крана с коническими колёсами требуют высокой точности соблюдения геометрических размеров конструкции, поскольку для совпадения центра вращения крана и центра рельсового пути в одной точке необходимо совместить центры качения 16 конических колёс;
- для уточнения характера износа и условий напряжённо-деформированного состояния рельса, а также клиновидных регулирующих прокладок требуется накопить экспериментальный материал и выполнить расчётное обоснование, чтобы предотвратить отрыв башмаков;
- полярные краны требуют обязательного контроля геометрических параметров м/к в совокупности с правильной и точной установкой колёс.
Литература
-
Пимшин Ю.И., Наугольнов В.А., Пимшин И.Ю. Анализ ходовой части кранов радиального действия при движении их по окружности // Изв. ВУЗ Сев. Кавказ. регион. Сер. Техн. науки.-2009.- Спецвыпуск.- с. 95-100.